A Simulation Framework for Developing Circuit Diagram To design a drone's flight controller and navigation system: Define requirements, select hardware, program the flight controller, integrate sensors, implement GPS navigation, establish reliable Understand the drone dynamics and perform tradeoff studies prior to building prototypes; Tune parameters and models before uploading them to the drone; Test the robustness of models and algorithms for edge conditions without risking the drone; Create a virtual environment tailored to the test cases; Run multiple scenarios and test cases rapidly
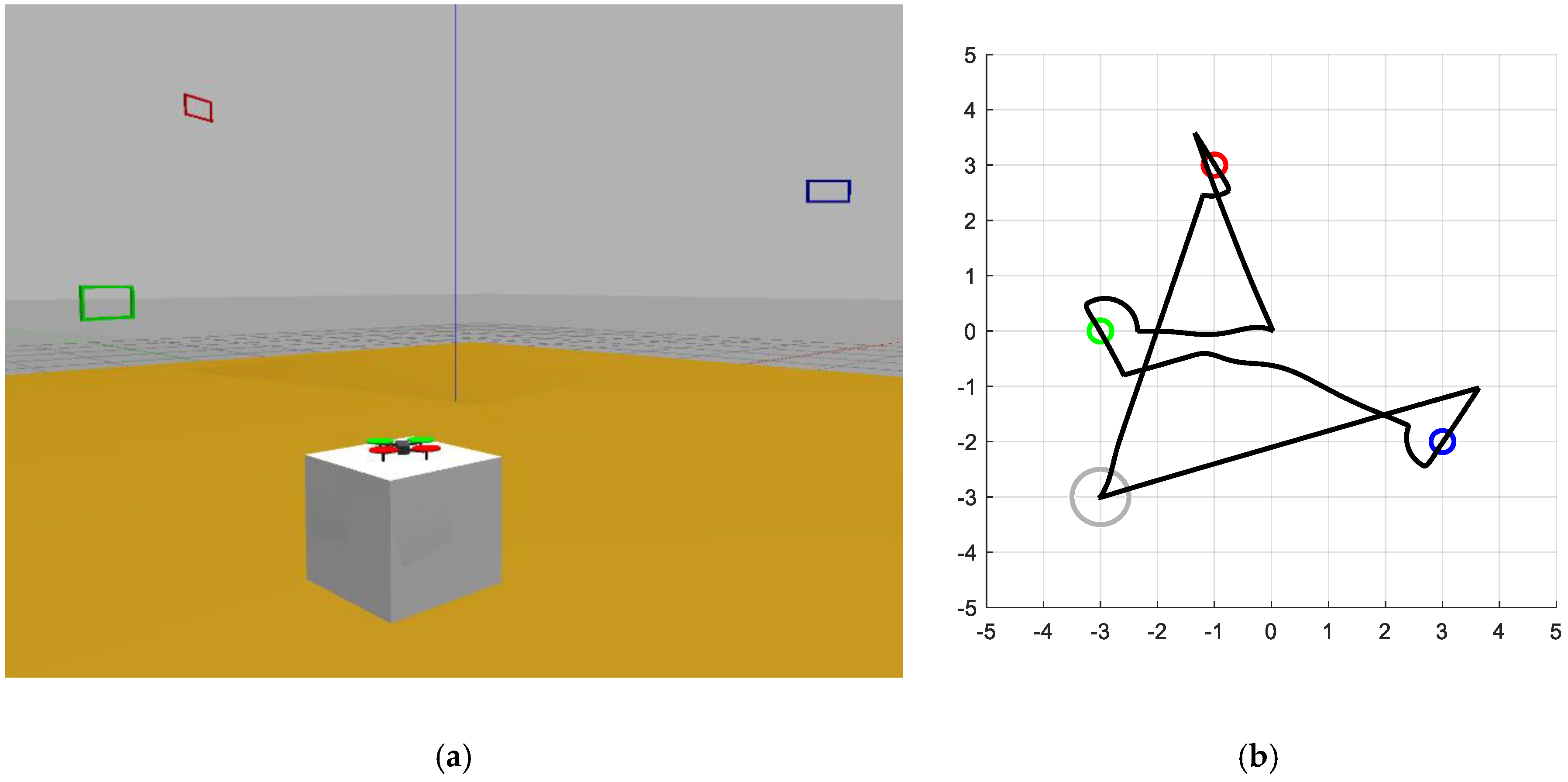
The goal of this project is to create a navigation system for drones that allows them to travel safely and efficiently from their starting point to their destination, even in environments that are constantly changing. This involves designing an intelligent algorithm that enables the drone to autonomously find its path while avoiding obstacles In this blog, we'll create a simple drone navigation system using Python, Matplotlib, and the A* algorithm. By the end, you'll have a working system that visualizes a drone solving a maze! What You'll Learn. Basic AI terminologies like "agent" and "environment." How to create and visualize a maze with Python.

planning: A Navigation System that helps ... Circuit Diagram
The Autonomous Drone Navigation System is an AI-powered solution developed to simulate drone navigation with advanced obstacle avoidance and path planning capabilities. Designed exclusively for simulation environments, this system achieves a remarkable 99.9% safety rate in navigating complex scenarios without the need for physical hardware. An advanced autonomous drone navigation system using complex technologies in computer vision and AI for real-time obstacle detection, environmental interaction, and adaptive flight path management. Create your feature branch (git checkout -b feature/AmazingFeature). Commit your changes (git commit -m 'Add some AmazingFeature'). Push to the

The complexity of a navigation system is an important consideration in the design of drone communication systems and is usually associated with greater power requirements, infrastructure demands, and computational demands. In the case of an autonomous mission, a computationally complex system may not be able to operate on a miniature drone. The control system must be robust enough to handle communication delays or interference while still providing reliable operation. The design of the control system must also take into account the specific needs of the application. For example, a UAV used for aerial photography may require more precise control than one used for agricultural